智能(néng)网联汽車(chē)中的V2X涵盖了汽車(chē)、通信、交通等领域的技术解决方案,V2X的实现需要双向通讯和多(duō)向通讯的通讯方式,能(néng)够实现車(chē)車(chē)之间、車(chē)人之间、車(chē)与交通灯等基础设施之间的通讯。V2X的应用(yòng)场景开发对于功能(néng)测试与验证有(yǒu)着至关重要的作用(yòng),场景开发的软件需具备更加丰富、真实、可(kě)靠的场景模块。
01
道路信息与基础设施的搭建
根据一期场景要求搭建三维虚拟交通道路,包括道路宽度、車(chē)道数量、十字路口信号灯、交通标志(zhì)以及路侧单元等信息,每一个模块都是参数化可(kě)调节,可(kě)定义可(kě)变的道路倾斜角、車(chē)道的平滑过渡、道路中心線(xiàn)的偏移,方便快速搭建道路模型。信号灯与路侧单元也可(kě)在Simulink中建立控制系统模型,实现V2I应用(yòng)场景的测试。
02
测试工况与交通参与者建模
功能(néng)测试最重要的一方面就是测试工况的建立,北理(lǐ)新(xīn)源利用(yòng)丰富的車(chē)辆模型(乘用(yòng)車(chē)、货車(chē)、卡車(chē)等)、行人模型(步行、骑行等),根据所选择的車(chē)辆与道路建立主車(chē)或遠(yuǎn)車(chē)的行驶工况,如图1所示,实现对主車(chē)行驶速度、行驶里程、行驶方向的控制,建立多(duō)辆背景車(chē)辆用(yòng)以判断最危险車(chē)辆。
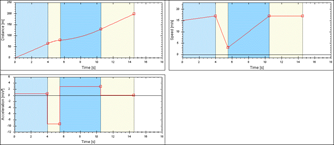
图1 行驶工况
03
建立法规制定的信息传输
車(chē)载终端交互的信息,不局限于法规规定的数据集,同时可(kě)以将自动驾驶汽車(chē)路径规划信息通过空口发送、共享,实现更多(duō)的协同。在V2X Plugin选项中可(kě)以选择CASE BSM信息,如图2所示,包括車(chē)辆的GPS位置、航向角以及姿态,这些信息通过软件中的OBU物(wù)理(lǐ)模型实现車(chē)与車(chē)、車(chē)与交通设施的相互通讯。
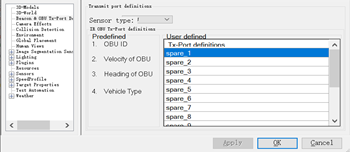
图2 信息传输
04
开发功能(néng)测试与Viewer界面
采用(yòng)软件自带的3D Viewer与仿真同步显示的图形观察器,实现从多(duō)个角度实时展示仿真场景的动态变化,视点是由摄像机位置、方向、视角和缩放级别指定的摄像机视图,如图3所示。前期对于V2X算法测试可(kě)通过模型在环的方式与Simulink联合仿真,也可(kě)以通过CAN总線(xiàn)将車(chē)辆信息发送给被测对象(OBU),完成OBU的硬件在环测试,提高V2X产品与算法的研发效率。
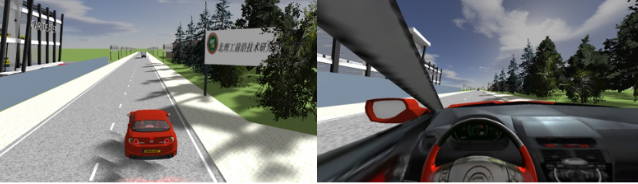
图3 可(kě)视化界面
虚拟场景的搭建不管是在自动驾驶还是V2X方面都是必不可(kě)少的一部分(fēn),北理(lǐ)新(xīn)源将不断丰富测试场景,推动场景多(duō)元化发展,继续為(wèi)客户提供高品质的V2X产品服務(wù)。